Microsimulation Results Show That Truck Platoons Equipped With Cooperative Adaptive Cruise Control (CACC) Technology Can Increase Traffic Throughput by Nearly Six Percent on Freeway Sections With Bottleneck Congestion.
An evaluation of CACC technology in the United States and Canada.
Nationwide, United States
Partial Automation for Truck Platooning
Summary Information
This study presents the potential benefits of cooperative adaptive cruise control (CACC) by deploying the technology in a platoon of three trucks. The project was designed to gauge the potential for CACC to improve heavy truck operations in the short term, the willingness of drivers to participate in CACC-enabled platoons with short time gaps between trucks, and the achievable energy savings at the preferred time gaps. CACC uses dedicated short-range communication (DRAC) (short-range to medium-range wireless communication channels designed for automotive use) and other technology components to enable vehicles to “talk” to each other. The technology was evaluated in simulation scenarios and on closed tracks and public highways in various cities in California and Virginia, USA and Quebec, Canada during 2016 to 2017. Long-haul truck drivers were recruited for some of the road tests to gauge their comfort with various time gaps between the trucks and their overall confidence in the technology.
METHODOLOGY
The researchers enhanced three trucks equipped with adaptive cruise control (ACC) technology (using sensors to maintain a safe distance from vehicles ahead) by adding communications and computing components to enable longitudinal control among multiple vehicles. DSRC was used that gave the trucks the ability to maintain set time gaps from each other while reducing the force of disturbances to ensure stable vehicle following. The CACC was built to maintain the selected time gaps at speeds above 20 mi/h and to react to vehicles entering or leaving the platoon. The components of the CACC system are shown in figure 1.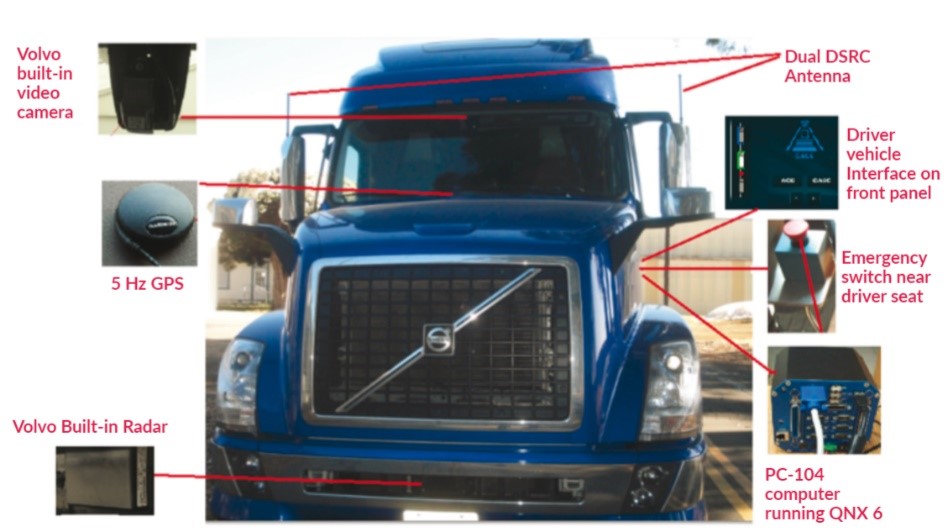
Figure 1. The components of the CACC system. Source: California PATH.
The proposed CACC system was first tested on closed tracks in Quebec, Canada; on an interstate near the Port of Los Angeles; and on State Route 87 in San Jose, California. Second, the usage of the technology was simulated in real traffic scenarios along I-710 in Southern California to explore how much CACC in multi-truck platoons could reduce traffic congestion and save fuel. Third, demonstrations were held on I-66 in Northern Virginia and on I-110 near the Port of Los Angeles. Finally, a test of driver comfort and acceptance of CACC was conducted in the San Francisco Bay Area and Central Valley of California that covered 168 miles on multiple interstates per round trip, with nine commercial truck drivers taking turns behind the wheels. The commercial truck drivers of the platooned trucks completed questionnaires about their comfort levels with the CACC technology.
FINDINGS
- The closed tracks test in Quebec showed that a trio of trucks using CACC and pulling standard trailers could cut their energy use by five percent on average. The number increased to 14 percent when aerodynamic enhancements were added to the truck trailers.
- Microsimulation results showed that the addition of CACC to the mixed traffic resulted in more throughput in bottleneck sections and higher speeds for the CACC-equipped trucks. The truck throughput rose nearly six percent, and the average truck speed increased by 19.3 percent, from 33.3 miles per hour (mph) to 39.7 mph. The average fuel savings for the trucks was three percent.
- The results from the driver comfort and usage questionnaire showed that participating truck drivers felt mostly comfortable and confident with CACC but less so when the platoon hit steep grades, causing the back two trucks to struggle to maintain the selected time gap. The drivers tended to deactivate CACC in such situations, as well as in heavier traffic and where highways merge.
- System development for the project showed that a CACC system can be created with relatively minor enhancements to commercially available ACC that can reduce the deployment cost of partially automated trucks.