Wrong-Way Detection System Pilot Project Using Thermal Sensors in Arizona Detected Wrong-Way Drivers Much Faster Compared to Traditional Methods Such as 911 Calls.
A Wrong-Way Detection System Pilot Project was Evaluated in Phoenix, Arizona.
Phoenix, Arizona, United States
Interstate 17 Wrong Way Vehicle Detection Pilot Program
Summary Information
Wrong-way crashes are a nationwide problem. Despite being relatively rare events, these types of crashes are more likely to be deadly. In Arizona, from 2004 to 2014, 25 percent of all wrong way crashes were fatal. To tackle, this the Arizona Department of Transportation (ADOT) started focusing on the use of technology and other countermeasures to reduce the risk of wrong-way crashes, and designed an integrated, corridor-level system with three main goals that were as follows: a) Detecting and tracking wrong-way vehicles, b) Alerting both wrong-way drivers and other motorists who could be in danger, and c) Notify law enforcement.
A 15-mile segment of I-17 in metro Phoenix was selected as the corridor for the wrong-way vehicle detection system pilot project and became operational in January 2018. This corridor had the highest potential for future wrong-way incursions, based on the historical number of wrong-way vehicle crashes along that corridor. The pilot system was designed to utilize existing power and communication systems along I-17. The pilot system used 90 thermal cameras positioned throughout the 15-mile corridor to detect wrong-way vehicles; wrong-way signs with flashing LED lights to alert wrong-way drivers; and dynamic message sign (DMS) advisories to warn right-way drivers.
METHODOLOGY
The system used thermal cameras for primary detection of wrong-way vehicles along exit ramps and at other potential points of entry onto the freeway’s mainline lanes. The system alerted wrong-way drivers using a custom- manufactured wrong-way sign with a flashing LED border. ADOT dispatchers and Arizona Department of Public Safety troopers stationed in ADOT’s Traffic Operations Center (TOC) in Phoenix visually verify and track wrong-way vehicles using the real-time video generated by the cameras. Using a custom-built decision support software (DSS), this verification triggers the automatic deployment of several countermeasures, including notification of law enforcement, repositioning of traffic cameras to track the wrong-way vehicle, activation of warning messages for right-way drivers on upstream freeway message signs, and holding the signals on upstream ramp meters at a steady red indication to discourage traffic from entering the freeway. The layout of the devices in the pilot system was illustrated in Figure 1.
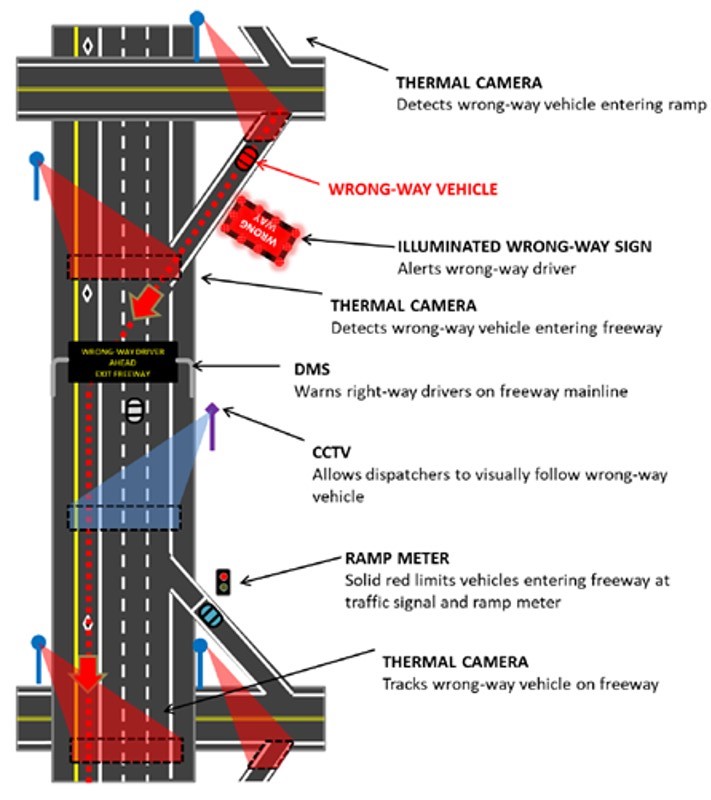
Figure 1. Pilot system device layout (Source: ADOT)
To help assess the system’s performance, ADOT collected and analyzed data on the number of monthly and annual wrong-way incursions detected during the pilot study in the pilot area from January 2018 to December 2019. An incursion was defined as a vehicle traveling the wrong way on the freeway exit ramp or mainline, and detected at a point of entry into the pilot study area. Based on analysis of wrong-way driving incidents during the two-year pilot, increased wrong-way vehicle detection and improved notification were the most significant benefits of the system.
FINDINGS
Overall, the wrong way detection system pilot resulted in increased detection, improved notification of law enforcement and driver self-correction:
- The detection system resulted in more than a threefold increase in wrong-way vehicle detections in the pilot area compared with using traditional methods such as 911 calls in 2018.
- The detection system improved notification of law enforcement. During the pilot, of the detected incursions that were also reported to 911, the detection system reported the wrong way incursion much faster, with an average of 1 minute and 38 seconds before a 911 call was received. The integration of the DSS made it possible to rapidly communicate with law enforcement and send automated warning messages to other drivers. This reduced the time between incursion and the apprehension of wrong-way drivers.
- During the two-year data collection period, 109 wrong-way vehicle incursions were identified within the pilot project’s limits. Within those incursions, 88 percent of drivers self-corrected on an exit ramp.