2019 Executive Briefing
 BRIEFING HIGHLIGHTS:
BRIEFING HIGHLIGHTS:
- The new wave of crash prevention and safety strategies includes the integration of vehicle and infrastructure safety systems and implementation of connected vehicle technologies for safety applications.
- During the EU’s VRUITS project, innovative ITS applications were demonstrated in the Netherlands and Spain to compile evidence-based recommended practices on how vulnerable road users can be integrated into innovative Intelligent Transport Systems (ITS).
Introduction
There were 37,133 people killed in motor vehicle traffic crashes on U.S. roadways during 2017. This number marked a 1.8-percent decrease from the previous year after two yearly consecutive increases in 2015 and 2016 [1]. Crash prevention and safety ITS try to minimize this number by detecting and providing alerts for unsafe conditions such as traffic approaching dangerous curves, off ramps, restricted overpasses, highway-rail crossings, high-volume intersections, work zones and adverse weather conditions.
Such systems typically operate by utilizing sensors that monitor the speed and characteristics of approaching vehicles and frequently also include weather sensors to monitor roadway conditions and visibility. Some systems provide a general warning of the recommended speed for prevailing roadway conditions, while other systems provide a specific warning by accounting for particular vehicle characteristics (truck or car) and a calculation of the recommended speed for the particular vehicle based on conditions.
Crash prevention and safety systems typically focus on vehicle and infrastructure design as their starting point, often resulting in the needs of Vulnerable Road Users (VRU) – such as cyclists and pedestrians – being overlooked. NHTSA’s National Center for Statistics and Analysis found that the proportion of crash fatalities of people “outside the vehicle” (motorcyclists, pedestrians, cyclists, and other nonoccupants) increased from a low of 20 percent in 1996 to a high of 33 percent in 2017 [1].
To address this, more crash avoidance systems are looking at ways to integrate VRUs into the equation by providing warnings of the presence of pedestrians, bicyclists, and even animals on the roadway. In some cases, manual systems are employed, where pedestrians or bicyclists manually set the system to provide warnings of their presence to travelers; however, these systems are being replaced with automated systems with the increasing implementation of connected vehicle technologies. With the introduction of connected vehicle safety applications, crash prevention and safety systems are also moving from passive driver warning systems, to active driver assistance systems where the vehicle can automatically react to other vehicles or road sensors during hazardous conditions.
Intersection Collision Warning Systems:
Intersection collision warning systems use sensors to monitor traffic approaching dangerous intersections and warn vehicles of approaching cross traffic, using roadside infrastructure, in-vehicle systems, or some combination of the two. The newer approaches to intersection collision warning systems provide information to drivers on proper maneuvers (gap acceptance assistance) and warn drivers of right-of-way violations at intersections. The warnings may include the driver’s vehicle violating traffic control signs or signals or of another vehicle violating, or about to violate, the subject vehicle’s right-of-way. Specific examples are provided below:
- Left Turn Assist: Warnings given to driver via an in-vehicle system when trying to make a left turn that may be visually blocked by another car or object. Warnings can alert the driver that a left turn should not be attempted.
- Traffic Control Violation Warning: Warnings given to drivers via in-vehicle systems if it is determined the driver may violate a red light or other traffic control device.
- Stop Sign Gap Assist: Information provided to drivers while stopped at a stop sign where only the minor road has stop signs. The driver receives information of any danger to the vehicle proceeding through the intersection from vehicles approaching on the cross street.
Collision Avoidance Systems:
To improve the ability of drivers to avoid accidents, vehicle-mounted collision warning systems (CWS) continue to be tested and deployed. These applications use a variety of sensors to monitor the vehicles surroundings and alert the driver of conditions that could lead to a collision. Examples include forward collision warning, obstacle detection systems, rear impact collision warning, “do not pass” warnings, and road departure warning systems.
Collision Notification:
| Though total traffic fatalities in the US fell by nearly 18 percent from 2006 to 2015, pedestrian and bicyclists fatalities rose by 12 percent and 6 percent, respectively, during the same ten-year period [2]. |
In an effort to improve response times and save lives, collision notification systems have been designed to detect and report the location and severity of incidents to agencies and services responsible for coordinating appropriate emergency response actions. These systems can be activated manually (Mayday), or automatically with automatic collision notification (ACN), and advanced systems may transmit information on the type of crash, number of passengers, and the likelihood of injuries.
Benefits
In-vehicle active and passive safety technologies have shown to provide significant benefits to road users. The most significant findings are that in-vehicle technologies, including automated braking systems, have the ability to significantly reduce the number of injuries and fatalities due to collisions. Table 1 highlights some of these findings.
| Categories | Selected Findings |
|---|---|
| Collision Avoidance | A German study finds that Lane Change Assist Systems on motorcycles would prevent 17 to 24 percent of motorcycle crashes resulting in injuries (2017-01201). |
| Collision Avoidance | End-of-Queue Warning system installed along I-35 in Texas estimated to have reduced crashes by 44 percent, resulting in $1.36 million in reduced crash costs (over a one year period) (2017-01144). |
| Collision Avoidance for Transit Vehicles | Statewide pilot of a vision-based Collision Avoidance Warning System for transit buses in Washington demonstrates a 72 percent reduction in near-miss events, with the potential to reduce insurance claims by 58.5 percent (2017-01211, 2017-01198). |
| Pedestrian Safety | A simulation performed by the Volpe Center found that Pedestrian Crash Avoidance/Mitigation Systems can reduce up to 24 percent of annual vehicle-pedestrian crashes where fatalities are involved (2017-01179). |
| Bicycle Safety | In field tests in the Netherlands involving intelligent bicycles coupled to automated vehicle braking systems, 96 percent of drivers and 60 percent of cyclists surveyed agreed that the connected system was effective at reducing accidents (2018- 01234). |
| Speed Enforcement | Study for the Insurance Institute for Highway Safety finds that automated speed enforcement cameras in Montgomery County, Maryland reduced crashes resulting in fatal or serious injuries by 49 percent (2015-01018). |
Costs
The ITS Knowledge Resources database provides a variety of system costs for crash prevention and safety strategies that range from individual in-vehicle collision avoidance systems to estimates of nationwide implementations of connected vehicle networks. Recent cost estimates added to the database for in-vehicle collision avoidance systems are shown in Table 2.
| In-vehicle collision avoidance system | Year | System Cost |
|---|---|---|
| Intersection Collision Warning System (2018-00392) | 2016 | $9,000 to $142,500 depending on number of lanes and if systems are post or overhead mounted. |
| Truck Collision Avoidance System (2017-00382) | 2017 | $2,500-$4,000 per tractor. |
Best Practices
The ITS Knowledge Resources database identifies several lessons learned and best practices for crash prevention strategies.
Include transit drivers in the development and testing of new collision avoidance technologies to help gain driver acceptance of these technologies (2017-00799).

Gaining driver acceptance of new technologies and seeking their participation in testing new products, though necessary, can be a challenge. A 2016 demonstration conducted under the auspices of the Washington State Transit Insurance Pool (WSTIP) involved field testing and evaluating a vision-based Collision Avoidance Warning System (CAWS) that uses cameras to provide coverage of blind zones where vulnerable road users may be hidden from transit drivers’ view. Alerts and warnings about imminent collisions are displayed to the driver by visual indicators located on the windshield and front pillars.
Driving a bus requires skill and concentration and warning indicators often divert attention from the driving tasks at hand. After initial development and testing in non-revenue operation, the path to deployment of CAWS requires testing in revenue service. In addition to being made aware of the potential positive benefits of CAWS, drivers need to be thoroughly trained on the technology and should be able to have input to product development. Emphasizing the safety benefits and reduced likelihood of crash involvement with the development and deployment of such technologies should also have a positive impact on drivers, as collisions risk injury and career disruptions.
Pedestrian safety warning applications that rely on location data from mobile devices should be supplemented with LiDAR sensors to boost accuracy of pedestrian detection (2018-00813).

Improving pedestrian safety is an important goal of the Tampa Connected Vehicle Pilot. The Tampa Hillsborough Expressway Authority (THEA) used a combination of Light Detection and Ranging (LiDAR) (for detecting pedestrians) and connected vehicle technology (for communicating alerts) to help achieve that goal.
The midblock crosswalk on Twiggs Street at the Hillsborough County Courthouse that connects the courthouse and the nearest parking garage is one of the busiest crosswalks in downtown Tampa. THEA originally planned to implement the open-source Pedestrian Crossing (PED-X) application to warn pedestrians crossing Twiggs Street of approaching vehicles that might be on a collision course. The system design indicated that a Roadside Unit (RSU) would convert Basic Safety Messages (BSMs) broadcast by approaching vehicles to WiFi messages. Mobile devices (smartphones) carried by pedestrians would then receive these messages and compute the probability of a collision, based on the pedestrian’s current location and walking speed. However, during testing, it became evident that the mobile devices were unable to determine the pedestrian’s location and speed with sufficient accuracy to avoid numerous false alarms (for example, being able to distinguish stepping into the street from standing on the sidewalk). THEA decided to modify the vehicular side of PED-X to create the Pedestrian Collision Warning (PCW) application. Under the PCW application, two LiDAR sensors were installed near the crosswalk to detect the presence of a pedestrian, after which the roadside unit would then broadcast the information to any connected vehicles in the area.
Case Study
European Union VRUITS Project
The VRUITS project, co-funded by the European Commission, investigated how ITS can be utilized to improve the safety and mobility of Vulnerable Road Users (VRUs) and provided recommendations on actions to be taken to speed up the deployment of the most promising applications. During the VRUITS project, innovative ITS applications were demonstrated in the Netherlands and Spain that yielded significant findings related to increased intersection safety, mobility and comfort of VRUs.
A trial in Helmond, Netherlands tested the Intersection Safety (INS) system combined with Cooperative Autonomous Emergency Braking (CAEB). This system uses information transmitted over ITS-G5 wireless communications technology to create a local map of the surroundings of an equipped vehicle, which allows early detection of possible hazards. In the Dutch trial, a Road Side Unit (RSU) detects cyclists near a crossing that are outside the field of view of the vehicle and transmits data on the cyclists over ITS-G5. If a collision is imminent, the driver will receive a warning, and, if needed, the system will automatically brake to avoid a collision. In addition to the vehicle driver, the cyclist also receives a warning to initiate braking. During the tests, the system worked as expected with the Road Side Unit accurately detecting 81% of the oncoming cyclists. A survey of the test group found that perceived safety was enhanced for 96 percent of drivers and 60 percent of cyclists. However, a majority of the cyclists indicated they would have liked to have the warning earlier and were concerned about the influence of bad weather on the application.
The test users also expressed concerns about the potential for overreliance and reduction in alertness by the users, as well as the potential of reduced compliance with traffic rules by cyclists (2018-01234).
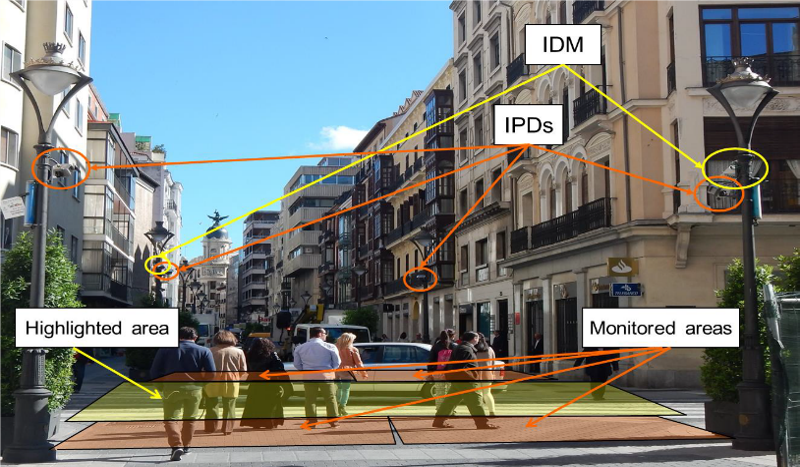
In Valladolid, Spain, the program tested a prototype Intelligent Pedestrian Traffic Signal (IPTS) system at an intersection known for having a high amount of pedestrian crossing infractions. Under the IPTS, Intelligent Pedestrian Detectors (IPDs) automatically detects pedestrians waiting to cross the intersection based on their trajectories and will request a green light to the Traffic Light Controller (TLC) if there are a certain number of persons waiting. The TLC then decides whether to give priority to the pedestrians over vehicles and extend their green phase, based on the state of the traffic lights. The trial also included an Illumination on Demand Module (IDM), which is used to highlight the crossing and its surroundings. The system reduced the average waiting time at the crossing, reduced the amount of infractions by 5% and reduced the amount of pedestrian congestion by 23%. The pedestrians claimed that due to the nature of the crossing, pedestrians should have priority and thus more green time for them than for the vehicles (2018-01233).
Similarly, a system to increase the safety and comfort of pedestrians by activating the demand for a green light and preventing collisions with right-turning vehicles was installed at a trial site in Alcalá de Henares, Spain.
For the trial, an intersection implemented a smart traffic controller based on the main characteristics of the Intelligent Pedestrian Traffic Signal (IPTS) and the Intersection Safety (INS) system from the two previous studies.
- The IPTS includes Vulnerable Road User-toInfrastructure (VRU2I) and Infrastructure-to-VRU (I2VRU) communications where pedestrians can activate green light demand for crossing an intersection via their smart phone. While VRUs are crossing, the IPTS detects them to extend the pedestrian green phase, ensuring a pedestrian’s safe crossing.
- The INS includes Infrastructure-to-Vehicle (I2V) communications to inform drivers turning right with low visibility about pedestrians' presence on the road. If the IPTS detects pedestrians on the crosswalk, an in-vehicle communication device (connected via the driver’s smart phone) transmits a warning to the driver.
The study experienced no significant decrease in the number of total pedestrian conflicts, however there was a 20% reduction of serious pedestrian-vehicle conflicts. In general, the participants in the user surveys did not perceive the crossing as any safer than before implementation of the system – although the system was well-received by participants with reduced mobility. The user experience was thought to possibly have been compromised by the low accuracy of GPS in urban canyons, and problems with cellular network coverage (2018- 01231).
References
- "2017 Fatal Motor Vehicle Crashes: Overview." Traffic Safety Facts Research Note, NHTSA National Center for Statistics and Analysis, October 2018. https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublic ation/812603.
- Pedestrian and Bicyclist Crash Statistics 2017. Pedestrian and Bicycle Information Center, The University of North Carolina Highway Safety Research Center. http://www.pedbikeinfo.org/data/factsheet_cr ash.cfm.



{kind=link}