Piloting Connected Vehicle Technology in New York City's Dense Urban Environment
This case study discusses "Piloting Connected Vehicle Technology in New York City's Dense Urban Environment" The project discussed in this case study was part of the USDOT's Connected Vehicle Pilot Deployment Program.
IN THIS CASE STUDY YOU WILL LEARN:
- How New York City Department of Transportation (NYCDOT) used connected vehicle (CV) technology to carry out Vision Zero
- How NYCDOT was able to meet the data collection needs for performance analysis while simultaneously maintaining driver privacy
- How NYCDOT overcame issues with the city’s “urban canyons” distorting the technology’s positioning accuracy
Safety at the Forefront
In 2014, New York City began its Vision Zero program to reduce the number of fatalities and injuries resulting from traffic crashes. One of the major ongoing initiatives under the program was the citywide speed limit reduction from 30 miles per hour (mph) to 25 mph. According to the National Highway Traffic Safety Administration (NHTSA), speeding is a factor in over one in four deaths [1]. In Manhattan, 73 percent of all crash fatalities involved pedestrians compared to 14 percent nationwide [2]. Vulnerable populations were particularly affected. While senior citizens over the age of 65 comprise only 12 percent of the population in New York City, they constituted about 33 percent of all pedestrian fatalities [3]. In addition, being struck by a vehicle was the primary reason for crash-related deaths among children under 14 years of age [3].

In 2016, the United States Department of Transportation (USDOT) awarded the New York City Department of Transportation (NYCDOT) $25 million as part of the Connected Vehicle (CV) Pilot Deployment Program. NYCDOT’s CV Pilot Deployment goals aligned with Vision Zero: reduce crash frequency and severity and manage vehicle speeds to the regulatory limit by deploying CV technology in tightly spaced intersections typical in a dense urban environment. In general, CV technology can increase safety by providing drivers with timely situational data that enhances driver decision making.
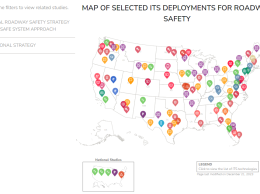
The NYCDOT CV Pilot Deployment project area encompassed three distinct areas in the boroughs of Manhattan and Brooklyn (Figure 1). The first area included a 4-mile segment of Franklin D. Roosevelt (FDR) Drive in the Upper East Side and East Harlem neighborhoods of Manhattan. The second area included several one-way corridors in midtown Manhattan. The third area covered a 1.6-mile segment of Flatbush Avenue in Brooklyn.
New York City already had much of the intelligent transportation systems (ITS) infrastructure in place to support the large-scale CV deployment, including a ubiquitous, mega-bit wireless network (NYCWiN), advanced transportation controllers (ATC) citywide, and an advanced traffic management system. For the project, 3,000 city fleet vehicles that frequent the deployment areas were outfitted with onboard CV technology, and 450 CV-enabled roadside units (RSUs) were installed at locations throughout the city to support vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications. To install the RSUs, NYCDOT had to undergo an 18-month process to obtain licenses for all 450 units from the Federal Communication Commission (FCC). Obtaining these licenses was required to prevent unintentional radio interference that could cause safety concerns both for the CV deployment and nearby services such as airports.
The onboard equipment provided warning beeps to drivers of equipped CVs to alert them to possible forward collisions or to crashes tied to lane changes. The CVs prompted drivers to drive safely when approaching work zones, to slow down when speeding, and warned them if they were about to go through a red light. The system also alerted drivers to emergency situations such as flash flood warnings.

In a city bustling with pedestrians, the NYC pilot also focused on reducing vehicle-pedestrian conflicts through in-vehicle pedestrian warnings. As part of an additional V2I project component, the project recruited volunteer visually impaired pedestrians and supplied them with personal mobile devices to assist them with safely navigating CV-equipped intersections within the city (Figure 2). The devices provided an audio output to help establish which corner of what intersection the pedestrian was approaching and indicated through audio or haptic prompts whether the pedestrian signal displayed the “WALK,” flashing “DON’T WALK,” or steady “DON’T WALK” indications for each crosswalk.
NYCDOT’s CV Pilot deployment involved over 20 city agencies, the Metropolitan Transportation Authority (MTA), the Pedestrians for Accessible and Safe Streets (PASS) Coalition, New York University (NYU), software and hardware suppliers, and various private contractors to support systems engineering and design. Most stakeholders involved in the project had established working relationships with NYCDOT, which fostered clear communication. NYCDOT utilized Memorandums of Understanding (MOUs) with their partners to clearly define paths for continued partnership throughout the pilot, including financial viability, ability to meet delivery and installation targets, specification adherence, etc.
Addressing Technical Challenges
Striking the Right Balance
During the system design phase, the project team had to determine the best way to provide warnings to drivers in imminent crash situations. NYCDOT needed the alerts to be able to get drivers’ attention without being too distracting. When gathering stakeholder feedback, NYCDOT learned that drivers did not want an additional screen in the cockpits, as they already had several other screens and gauges competing for their attention. To satisfy drivers’ needs, NYCDOT elected to install an audio-only Human Machine Interface (HMI) in participating vehicles. The audio-only HMI provides a series of tones and words associated with specific threats and situations. Tones notify the driver of an immediate threat, while preprogrammed directions are given to describe the situation.
|
“It took us considerable time to work with the stakeholders, the evaluators, and various lawyers from different groups to develop and agree on a [data collection] approach that would be acceptable to everyone. We had to demonstrate by design that it was physically impossible for us to collect personal information.” Bob Rausch, TransCore, NYC CV Pilot Site Deployment Lead |
Another major challenge for NYCDOT was trying to balance protecting individual driver privacy while still collecting sufficient data necessary to perform an assessment of the safety, mobility, and environmental impacts of the technology. The project team spent considerable time devising and implementing controls that scrubbed the trajectory data collected from the vehicles of potential Personally Identifiable Information (PII), while still preserving the data’s relative position in terms of time and space which was necessary for follow-on assessments. All location details of latitude, longitude, and elevation were removed and reprojected onto an artificial (X, Y, Z) metric coordinate system with point (0, 0, 0) being the location of where the alert occurred [5]. To allow for general context of the alerts, a system of time and location bins was developed and used to classify each event record. For example, an alert that occurred Tuesday January 5, 2021 at 8:35 AM along 5th Avenue would be recorded as “January; Mid-week day; AM; Manhattan; Arterial.”
Overcoming Location Accuracy Limitations
CV applications, particularly safety-critical ones such as collision warning, require lane-level positioning accuracy to function correctly. However, urban environments, where there are fewer satellites visible due to the tall surrounding buildings, can sometimes provide a challenging environment for a CV’s onboard Global Positioning Systems (GPS). Areas facing this issue are often referred to as “urban canyons.” As a result, alternative positioning methods or strategies must be developed to fill this gap.
Initial testing for vehicle location accuracy in New York City’s urban canyons revealed that the GPS signal at ground level was repeatedly being degraded or lost. Figure 3 shows the uncorrected GPS path of a test vehicle while travelling around the same block several times.
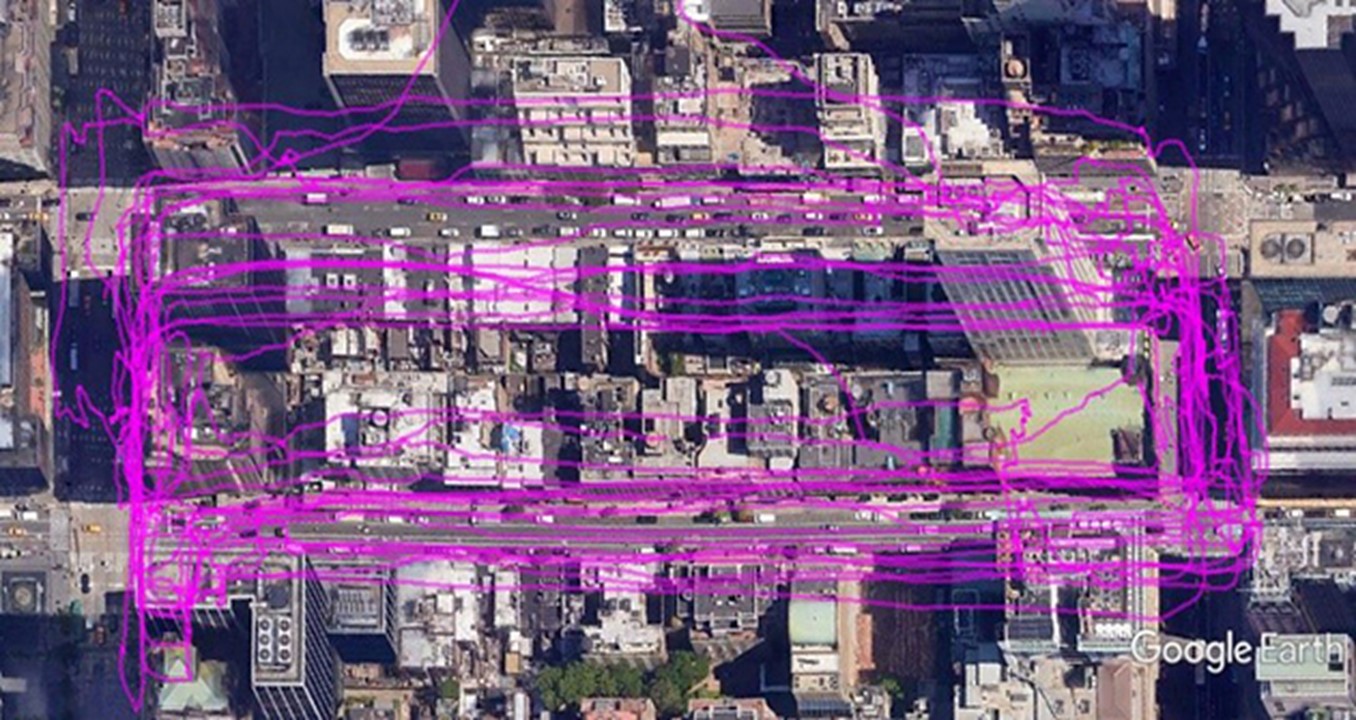

Source: NYCDOT
The NYCDOT CV Pilot and their suppliers explored various supporting techniques to improve location accuracy within the urban canyons and eventually developed an enhanced Vehicle-to-Everything (V2X)-locate positioning engine that fused together satellite-based ranging and RSU-based ranging for improved positioning. While testing the accuracy of the location correction engine, an important consideration became the precision of vehicles tracking a path and returning to the same location. This precision was addressed using simple laser pointers, tape, and temporary chalk spray paint [6]. The laser pointers were temporarily attached to the mirrors and bumpers of a few test vehicles (Figure 4). When a test vehicle was at the stop bar, the chalk spray paint was used to mark the laser on the pavement (Figure 5). This enabled the driver to repeatedly align the vehicle at the stop bar each trip around the block while recording the location information. Using this methodology, the NYCDOT CV Pilot team was able to quantify the location differences between each run, measuring the deviations detected when the vehicle was located at the stop bar. The measurements were then cross-referenced with the onboard device’s internal location information that was retrieved over several runs with the vehicle located at the same point each time.

Source: NYCDOT
This innovative use of beaming lasers generated a precise, repeatable way of verifying the accuracy of the vehicle’s location, helping NYCDOT fine-tune the V2X locate lane positioning engine to achieve the highest accuracy possible.
As the state of positioning technology evolves over time, the capabilities, costs, and availability of GPS solutions may change. Research is ongoing for improving both standalone and augmented positioning performance in urban environments. Given the promising future of connected vehicles, NYCDOT’s experiences with enhancing vehicle positioning data may serve as helpful lessons learned for other agencies deploying CV technology within similarly dense urban networks.
References
[1] "Risky Driving," NHTSA, [Online]. Available: https://www.nhtsa.gov/risky-driving/speeding#:~:text=For%20more%20than%20two%20decades,26%25%20of%20all%20traffic%20fatalities
[2] NYCDOT, "Manhattan Pedestrian Safety Action Plan- Vision Zero," 2015. [Online]. Available: http://www.nyc.gov/html/dot/downloads/pdf/ped-safety-action-plan-manhattan.pdf
[3] NYCDOT, "Vision Zero Action Plan," 2014. [Online]. Available: http://www.nyc.gov/html/visionzero/assets/downloads/pdf/nyc-vision-zero-action-plan.pdf
[4] Traffic Technology International, "NYC Gets Connected," 2018. [Online]. Available: http://viewer.zmags.com/publication/1601c0a8#/1601c0a8/6
[5] NYCDOT, "Connected Vehicle Pilot Deployment Program Phase 3 - System Performance Report - New York City.," 2021.
[6] USDOT ITS JPO, "New York City Connected Vehicle Pilot Uses an Innovative Approach to Verify Location Accuracy in the City's Urban Canyons," [Online]. Available: https://www.its.dot.gov/pilots/nyc_cvp_canyons.htm